背景
趣味で始めた赤道儀作りですが、人様からお金を頂こうと決めた時から、出荷検査用またはPEC用としてピリオディックモーションを机上で測定できる装置の必要性を強く感じておりました。
しかし、どこを探しても経済的に購入できる装置はありません。また、ん十万もする様な多軸赤道儀は別にして、ポタ赤メーカーさんに於かれましても、ピリオディックモーションの検査をしている様子は無く、多くの方々のブログを読む限りでは、赤道儀はどうも当たりハズレがあるらしい・・・装置と知りました。
ピリオディックモーションとは角速度の揺らぎです。
単位時間に回転する角度を正確に測定出来れば、計算値と測定値の差がピリオディックモーションエラー値です。
当初、マクロレンズで撮影しピクセル数から算出したり、ダイヤルケージで測定したり、レーザー変移計、点滅するLED、パソコンモニター・・・・実写。それぞれの詳細は書きませんが、どの方法も出荷検査としては実用的ではありません。
当赤道儀は568889パルスでホイールを一周します。つまり6.6PPS、最小送り角度は2.29秒角です。例えば、568889パルス/周のエンコーダーがあり、パルス数を計数できる装置があれば、2.29秒角精度でピリオディックモーションエラーを測定できます。
求める赤道儀のピリオディックモーション値は±30秒角以下(目標値)ですから、測定器の精度は少なくても10秒角、できれば6秒角の精度は欲しい所で、これを実現する為には、30万パルス/周以上のエンコーダーが必要です。ネットで観る限り、それを実現できるエンコーダーはキャノン製くらいで、見積¥40万でした。
当初、このエンコーダーを使用する以外、求める測定器を実現できるアイデアは無く、経済的とは言え、検査ができない以上、販売も含め、諦めかけた時、ブログでお世話になってる”匿名さん”からヒントを頂きました。
” モーターへの信号との「時間差」を見て検証する手段はあります。 ”
このアイデアを頂きました。
極軸に直結されたエンコーダーから出力されるパルスの1周期中にモーター駆動パルス数を計数するって方法です。
モーター駆動パルス数で極軸の回転角は計算でき、その計算結果と実測値の誤差がピリオディックモーションエラーになるはずです。
そのためには、定規であるエンコーダー内の光学スリット幅が求める精度で加工されている事が重要です。。
しかし、各エンコーダーメーカーの仕様書を見ても、そんな項目は無く、海外の製品で、加工のバラツキが100秒角まで保証したモノは有りましたが、仕様書から製品を決定できませんでした。
手元にOMRON製 200パルス/周 品があったので、事前評価し、不安は有りましたが・・・ここは賭け、加工精度は日本製って事で、OMRON製E6B2-CWZ6Cを購入(¥15000也)しました。
720パルス/周 スリットの加工が求める精度を満足していれば 0.5度毎にピリオディックモーション(角速度のゆらぎ)値を求める事ができるハズです。
では、どうやって、スリットの加工精度を測定するかが、新たな問題です・・・。
 エンコーダーを5秒角以下の精度で回転できる装置・・・
そんなモノが手元にある理由がありません。あれば、それこそが精度のムッチャ良い赤道儀です・・・。
エンコーダーを5秒角以下の精度で回転できる装置・・・
そんなモノが手元にある理由がありません。あれば、それこそが精度のムッチャ良い赤道儀です・・・。
こんな時は100年も前から確立されている物理現象を利用するに限ります。例えば振り子とか自由落下とか・・・で、部屋を見回すと・・・ありました(笑
買ったばかりの旋盤に付いてます。回転バランス(動バランス)も取れているだろう・・・チャック。これを限りなく等速でエンコーダを回転させるためのスタビライザーとして利用します。
 パソコンでデータ取り込み、エクセルでグラフ化できるカラクリがあれば便利だろうと、簡単なデーターロガーをつくりました。エンコーダーからのパルスで外部割り込み(#int_ext)をかけ、PIC_CPUのtimer1をイベントカンターとし、割込みインターバル間のカウンター値をパソコンに送る。エンコーダーのZ相でトリガをかけ位相管理する・・・そんなイメージのデーターロガーです。
パソコンでデータ取り込み、エクセルでグラフ化できるカラクリがあれば便利だろうと、簡単なデーターロガーをつくりました。エンコーダーからのパルスで外部割り込み(#int_ext)をかけ、PIC_CPUのtimer1をイベントカンターとし、割込みインターバル間のカウンター値をパソコンに送る。エンコーダーのZ相でトリガをかけ位相管理する・・・そんなイメージのデーターロガーです。
右写真のエンコーダーに直結したフライホイール(旋盤のチャック)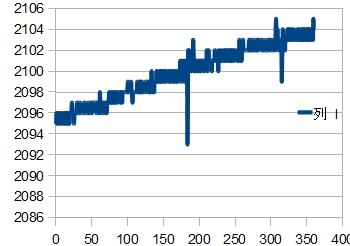 を手回します。回転は徐々に遅くなり、エンコーダーからの割込みインターバルが0.5ms(2kHz)近くになったタイミングで4MHzの正確なクロックを
イベントカウンター(timer1)で計数します。つまり、エンコーダーからの1パルス幅(0.5°1800秒角)を正確な(素性のはっきりした)約2000パルス(4MHz÷2kHz = 2000)の定規で測る事と同じで、測定精度は1秒角を保証できるハズです。
(定規の1パルスは正確な0.25μ秒)右グラフが生データです。(x軸:回転角,y軸:カウント値)
を手回します。回転は徐々に遅くなり、エンコーダーからの割込みインターバルが0.5ms(2kHz)近くになったタイミングで4MHzの正確なクロックを
イベントカウンター(timer1)で計数します。つまり、エンコーダーからの1パルス幅(0.5°1800秒角)を正確な(素性のはっきりした)約2000パルス(4MHz÷2kHz = 2000)の定規で測る事と同じで、測定精度は1秒角を保証できるハズです。
(定規の1パルスは正確な0.25μ秒)右グラフが生データです。(x軸:回転角,y軸:カウント値)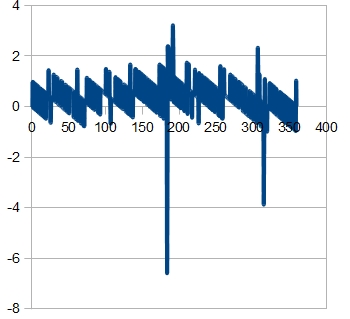 184°315°位置にひげがあります。何回測定しても同じ場所に出ますから、スリットにバリがあるのかも知れません。回転が遅くなるに従い、カウント
値は増えます。回転速度はエクスポネンシャルで減衰しているはずですが、直線的に変化しているものとして、スリット幅のバラツキを算出します。大雑把な方法ですが、光学スリットの加工精度は±2秒以下と判断でき、当赤道儀のピリオディックモーションを測定するためには十分な精度があると思います。
184°315°位置にひげがあります。何回測定しても同じ場所に出ますから、スリットにバリがあるのかも知れません。回転が遅くなるに従い、カウント
値は増えます。回転速度はエクスポネンシャルで減衰しているはずですが、直線的に変化しているものとして、スリット幅のバラツキを算出します。大雑把な方法ですが、光学スリットの加工精度は±2秒以下と判断でき、当赤道儀のピリオディックモーションを測定するためには十分な精度があると思います。
(1800秒を平均2100個のパルスで計測しているので、Y軸の1目盛は0.86秒角相当)
検査治具として・・
上記では定規として4MHzのオシレーターを使用しましたが、治具ではモーターの駆動パルスを使います。当赤道儀は1駆動パルスで2.27812秒角回転します(6.6PPS)。エンコーダーの1パルス周期は0.5°(1800±2秒角)ですから、設計値はエンコーダーの1パルス周期で790回駆動パルスを計数します(1800÷2.27812 = 790.125 カウント)。この時がピリオディックモーション値はゼロで、790カウントとの差値と2.27812の積がピリオディックモーションエラー値になります。下グラフは当赤道儀の試作8号機Aサンプルを全周評価し、ピリオディックモーションエラー値を算出したグラフです。。
(x軸:回転角度 y軸:ピリオディックモーションエラー値)
なんとかこのサンプルは±30秒角以内に収まっている様子です。当赤道儀は全品このテストを行い、比較的変動の少ない所、上の例なら230°を仮想原点として出荷する予定です。
。。to be continued (記:20111001)