コンセプト・仕様
ブログでは7号機について、断片的に発信してますがHPは半年ぶりの更新です。
当初、7号機の試作でこれほど時間がかかるとは、思っても見ませんでした。6号機で、まずまずの結果も得られ、単純な構造で、正確にモーターを回転させれば、用は足ると
・・・確かにその通りなのですが、思い込み、25秒角を実現する事と精度を持った測定の難しさ、メカの加工限界、現実的なコスト・・・
無知のなせる業と言いますか、7号機でいっぱい学ぶ事ができました。
7号機の目指した仕様
① ”モバイル赤道儀(ポタ赤) ” の世界最小、最軽量を目指す。(目標:800g以下)
② 当地の極軸傾斜35度を意識した本体ユニットとする。
③ 電源(電池)以外全てを本体ユニットに内蔵する。
④ インターバルタイマー機能を内蔵する。
⑤ 最小ステップ角:5.4秒角
⑥ ピリオディックモーション:±25秒角以内 (eos20d 50mm撮影時のピクセル間)
⑦ 完全自動追尾方式
⑧ 恒星撮影モード、星景撮影モード、北半球駆動モード、南半球駆動モード
⑨ 電源電圧 9.6v-15v 単三ニッケル水素電池8-10本、単三アルカリ電池8-10本
⑩ 連続10時間駆動を実現する。
⑪ 販売価格¥30,000(税抜)を実現する。
7号機の反省と8号機へ・・・
①現状850gです。ボンデ鋼板をアルミ材に変更する事で、クリアできるとは思っておりますが、剛性をどこまで保てるか?8号機でチェック予定です。
③プリント基板を含め物理的には実現できているのですが、操作でカメラが揺れるため、基板を含めた制御部を本体に内蔵する事は必ずしも有効では無いと感じております。
 ⑥市販されてる部品をそのままの状態で、単純に組み立てるだけでは実現しません。量産で安定してその数値を得る為には、それなりの工夫が必要です。
⑥市販されてる部品をそのままの状態で、単純に組み立てるだけでは実現しません。量産で安定してその数値を得る為には、それなりの工夫が必要です。
⑨ウォームギヤはセルフロックが実現でき、モーターの自己保持エネルギーが不要なため、ギヤを送る一瞬時間のみに給電できるよう、プログラムで操作する事で、
エネループ8本、8時間の連続駆動の目処が立ちました。
⑪なかなか難しい状況です。例えばカバー無し?(写真右⇨)で・・・・なら・・・なんとかなりそうですが、、そらだめですよね・・・8号機でなんとかしたい。
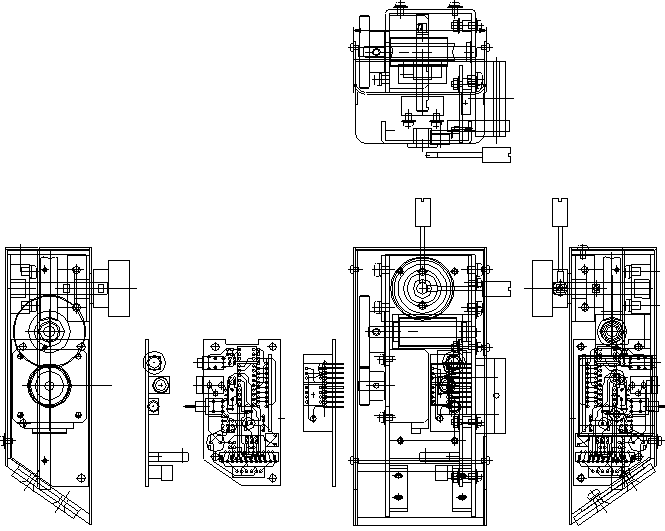
メカ図
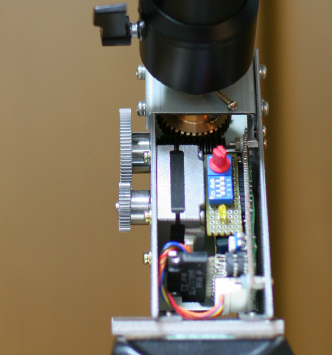
制御部(6号機から大きな変更は無し)
 ① 実装するモータードライバーICはサンケン製SLA7078MRを使用、マイクロステップは1/16。
① 実装するモータードライバーICはサンケン製SLA7078MRを使用、マイクロステップは1/16。
② CPU PIC16F818。
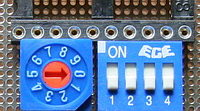
③ インターバルタイマー用レリーズスイッチとしてフォトモスリレーを採用。インターバルタイマーの時限設定は10種。→写真コードSWで選択する。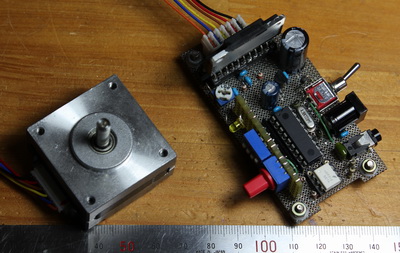
時限はとりあえず15秒、30秒、45秒、1分、2分、4分、8分、10分、20分、30分、お客様のオーダーメイドに対応する事も面白いかも知れない。
④ 恒星撮影モード、星景撮影モード、北半球駆動モード、南半球駆動モード、ポーラーファインダー調整モード(早送)は→写真のDIP_SWで行う。
ひとりごと
7号機 200mmクラスで撮影するかぎりでは、大きな問題は無いレベルまで、完成度は上がっている様に思います。
でも、気に入らない点が何点かり、その中の一つ、ピリオディックモーションは相変わらず±25~30秒角あり(20110117現在)、もう少しなんとかならないかとカットアンドトライの毎日です。
工房で正確なピリオディックモーションエラーを計測できないため、対策検証も天候待ちが多く、思うように改善が進みません・・・。
でも、少なくても、市販部品を単純に組み立てるだけで実現できる性能よりは上を目指したいと考えております。

165mm f/7.1 ISO1000 60s×4
南側のベランダで撮ったため、極軸合わせが悪く少し流れました・・。
